Robô de tênis de mesa da Sony AI vence jogadores de alto nível enquanto robôs humanoides quebram recordes em corrida em Pequim
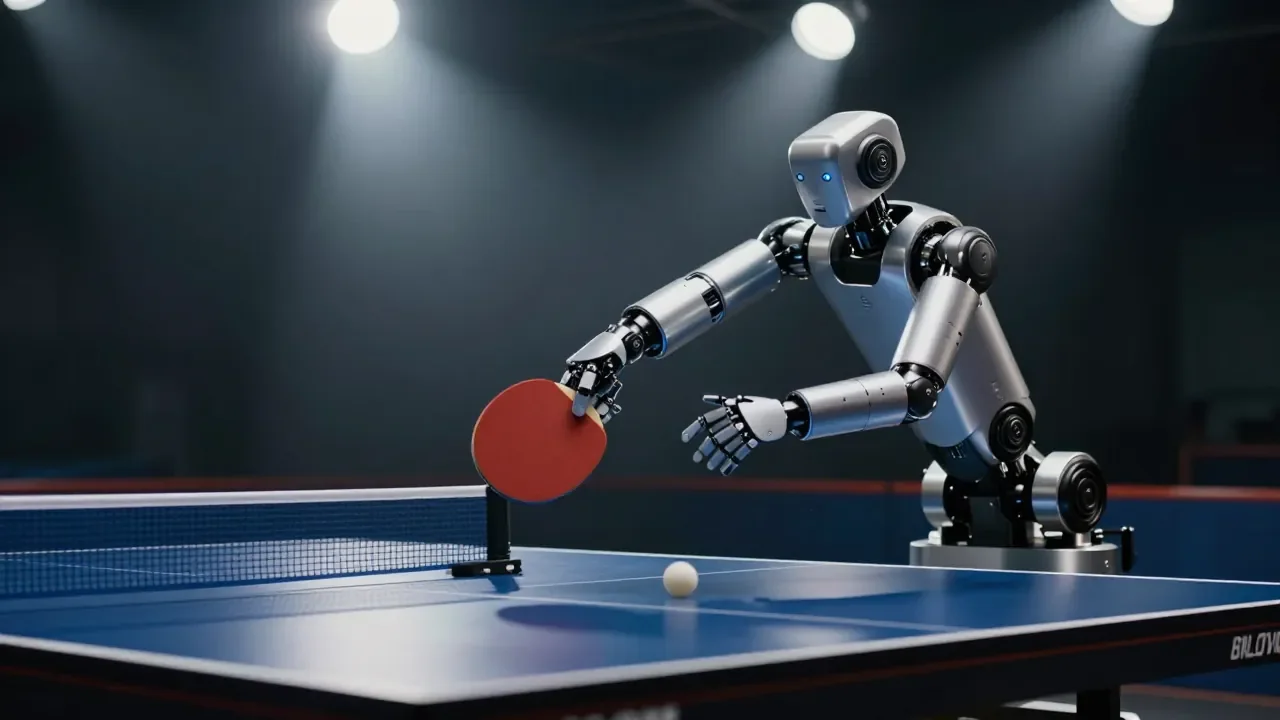
Uma pesquisa publicada na revista Nature revelou que um robô autônomo de tênis de mesa, desenvolvido pela divisão de inteligência artificial da Sony, conseguiu vencer e desafiar jogadores humanos de elite em partidas regulamentadas. O sistema, batizado de Ace, representa um avanço no campo conhecido como inteligência artificial física, área em que algoritmos de inteligência artificial são incorporados a máquinas que operam no mundo real, lidando com variáveis imprevisíveis como velocidade, atrito e interação com objetos em constante mudança. O resultado marca um salto em relação aos robôs de mesa que existem desde os anos 1980, os quais nunca haviam conseguido igualar o desempenho de jogadores humanos avançados.
Para Peter Dürr, diretor da Sony AI em Zurique e líder do projeto, esportes físicos em tempo real continuam sendo um desafio em aberto para a inteligência artificial. Enquanto sistemas já superaram especialistas humanos em ambientes digitais totalmente simulados, como xadrez e jogos de computador, o tênis de mesa exige percepção rápida, controle motor preciso e tomada de decisão sob pressão em frações de segundo. Cada rebate envolve variáveis como rotação complexa da bola, trajetórias angulares e velocidades que dificilmente podem ser antecipadas sem processamento visual de altíssima velocidade.
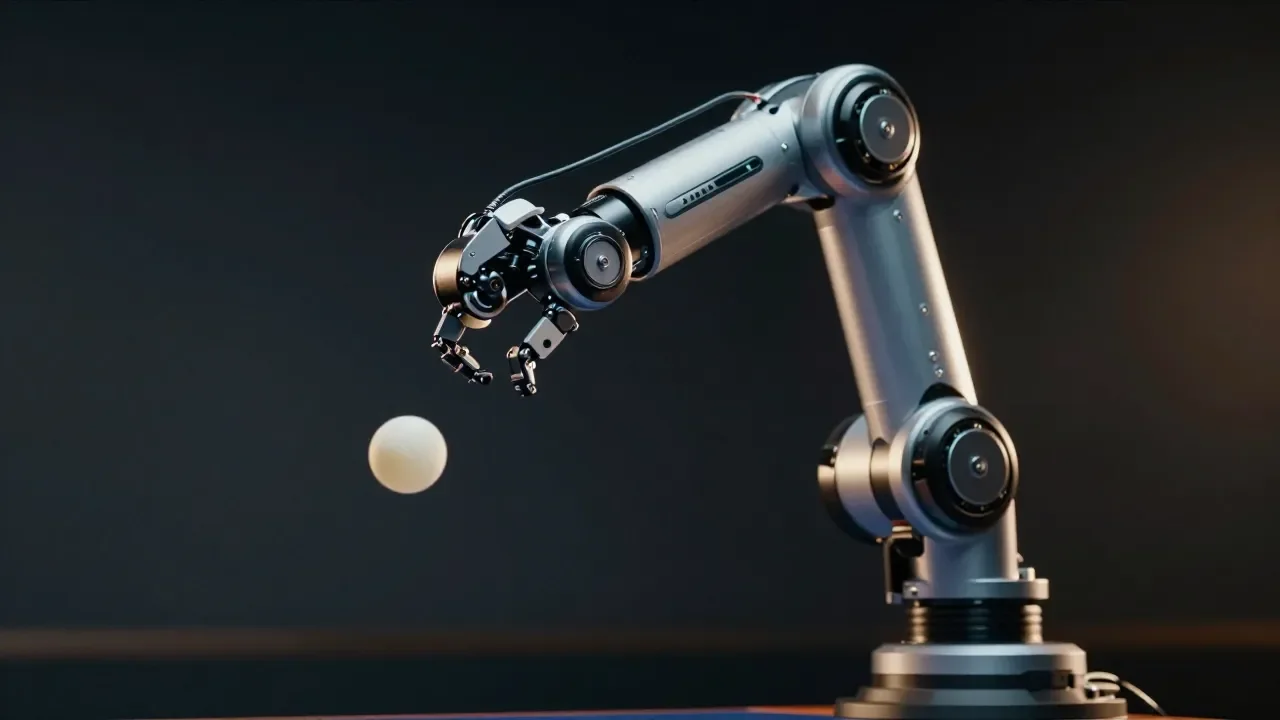
A arquitetura de Ace foi projetada para lidar com essas exigências. O sistema conta com nove câmeras sincronizadas e três subsistemas de visão que monitoram o movimento e a rotação da bola. O processamento dos dados visuais ocorre em uma frequência de duzentos hertz, velocidade suficiente para capturar movimentos que seriam imperceptíveis a olho nu. Essa capacidade de percepção é combinada com um braço robótico equipado com oito articulações que controlam a raquete: três delas definem o posicionamento, duas ajustam a orientação e as três restantes gerenciam a força e a velocidade dos rebatimentos. Essa configuração foi desenhada para atender aos requisitos mecânicos mínimos necessários para a prática competitiva do esporte.
Ao contrário de muitos sistemas de inteligência artificial treinados a partir de demonstrações humanas, Ace aprendeu a jogar exclusivamente por meio de simulação. O robô passou por um processo de aprendizado por reforço, técnica na qual o sistema desenvolve estratégias próprias por tentativa e erro em ambientes virtuais antes de aplicá-las no mundo real. Essa abordagem resultou em padrões de jogo que diferem dos utilizados por adversários humanos, tornando o estilo do robô mais difícil de ser antecipado. Dürr explicou que o sistema aprende não por observar pessoas, mas por meio de autotreinamento em ambientes simulados, o que lhe permite desenvolver abordagens originais.
As partidas foram conduzidas segundo as regras da Federação Internacional de Tênis de Mesa e arbitradas por árbitros credenciados. Nos primeiros testes documentados em abril de 2025, Ace venceu três de cinco confrontos contra jogadores de elite e foi derrotado em dois jogos por adversários de nível profissional. Em partidas subsequentes realizadas em dezembro de 2025 e no início de 2026, o sistema obteve vitórias também contra jogadores profissionais, consolidando sua capacidade competitiva em cenários cada vez mais exigentes.
Jogadores que enfrentaram o robô relataram dificuldades específicas na hora de interpretar seus movimentos. A profissional Mayuka Taira, que perdeu uma partida para o sistema, destacou que a ausência de sinais emocionais e corporais tornava praticamente impossível antecipar as reações do adversário mecânico. Segundo ela, por não ser possível ler as reações do robô, era inviável perceber que tipos de rebatimentos poderiam causar maior dificuldade ao sistema. Rui Takenaka, jogador de elite que tanto venceu quanto perdeu para Ace, observou que o robô lidava bem com rotações complexas, mas se mostrava mais previsível em saques mais simples.
O projeto de Ace integra um esforço mais amplo da Sony AI para investigar como robôs podem reagir com velocidade e precisão em ambientes dinâmicos. Segundo a equipe responsável, as técnicas de percepção e controle desenvolvidas para o sistema poderiam ser aplicadas em áreas como manufatura industrial e robótica de serviços, onde a capacidade de responder rapidamente a mudanças no entorno físico é igualmente crítica. O trabalho atual continua voltado para aprimorar a adaptabilidade do sistema durante as partidas, tornando-o capaz de se ajustar em tempo real ao estilo de cada adversário.
Paralelamente aos avanços no tênis de mesa, outra demonstração do progresso da inteligência artificial física ocorreu em Pequim, durante a segunda edição da Meia Maratona de Robôs Humanoides de Pequim E-Town, realizada em abril de 2026. Um robô humanoide chamado Lightning, desenvolvido pela empresa chinesa Honor, completou o percurso de vinte e um quilômetros em cinquenta minutos e vinte e seis segundos, tempo inferior ao recorde mundial humano da distância, registrado pelo corredor olímpico Jacob Kiplimo em março do mesmo ano, com cinquenta e sete minutos e vinte segundos.
O evento reuniu mais de cem robôs e aproximadamente doze mil participantes humanos, que correram em pistas separadas. Apesar de ter colidido com uma barreira durante o percurso, Lightning continuou a corrida e cruzou a linha de chegada em primeiro lugar. Robôs da mesma empresa também ocuparam a segunda e a terceira colocações. O resultado representou uma melhoria expressiva em relação à edição anterior, quando o robô mais rápido completou o trajeto em duas horas, quarenta minutos e quarenta e dois segundos.
Outro robô da Honor completou o percurso em quarenta e oito minutos, porém sob controle remoto. Como as regras da competição priorizavam a navegação autônoma, Lightning foi reconhecido como o vencedor oficial. Engenheiros da empresa afirmaram que tecnologias desenvolvidas para o robô, incluindo sistemas de refrigeração líquida e estruturas mecanicamente confiáveis, poderiam ser aplicadas em cenários industriais. Os organizadores do evento destacaram que a prova foi concebida para testar robôs humanoides em condições reais de grande escala.
Os dois casos ilustram uma tendência crescente na pesquisa de inteligência artificial: a transição de ambientes digitais controlados para o mundo físico, onde variáveis como atrito, luz, vento e interação humana tornam os desafios significativamente mais complexos. Enquanto os algoritmos já dominam jogos de tabuleiro e ambientes virtuais, os avanços recentes em percepção visual de alta velocidade, aprendizado por reforço e controle motor autônomo sugerem que a inteligência artificial física está se tornando uma frente relevante de pesquisa e desenvolvimento tecnológico.